- Regulación Automática
-
Regulación Automática
La regulación automática es una rama de la ingeniería que se ocupa del control de un proceso en un estado determinado; por ejemplo, mantener la temperatura de una calefacción, el rumbo de un avión o la velocidad de un automóvil en un valor establecido.
La regulación automática, también llamada Teoría de Control, estudia el comportamiento de los sistemas dinámicos, tratándolos como cajas o bloques con una entrada y una salida. En general, la entrada al sistema es una señal analógica o digital que se capta en algún punto del sistema. Los bloques intermedios representan las diversas acciones perturbadoras que afectan a la señal, como rozamientos en los actuadores, así como el efecto de los elementos de control interpuestos, los reguladores. Estos efectos se suelen representar mediante las funciones matemáticas que los describen, llamadas funciones de transferencia. La salida del sistema se llama referencia y corresponde al valor de la señal tras actuar sobre ella las anteriores funciones de transferencia. Cuando una o más de las variables de salida de un sistema tienen que seguir el valor de una referencia que cambia con el tiempo, se necesita interponer un controlador que manipule los valores de las señales de entrada al sistema hasta obtener el valor deseado de salida.
Contenido
Historia
Aunque existen diversos tipos de sistemas de control desde la Antigüedad, la formalización del dominio de la Regulación comenzó con un análisis de la dinámica del regulador centrífugo, dirigida por el físico James Clerk Maxwell en 1868 bajo el título On Governors, Sobre los Reguladores. Aquí describió y analizó el fenómeno de la "caza", en el que retrasos en el sistema pueden provocar una compensación excesiva y un comportamiento inestable. Se generó un fuerte interés sobre el tema, durante el cual el compañero de clase de Maxwell, Edward John Routh, generalizó los resultados de Maxwell para los sistemas lineales en general. Este resultado se conoce con el nombre de Teorema de Routh-Hurwitz.
Una aplicación notable de la Teoría de Control se encontró en el área del vuelo tripulado. Los hermanos Wright sus primeros vuelos con éxito el 17 de diciembre de 1903 y se distinguían por su habilidad para controlar sus vuelos durante períodos sustanciales, más que por su habilidad para aprovechar el empuje de un perfil alar, que ya era conocido.
Durante la Segunda Guerra Mundial, la Teoría de Control fue parte importante de los sistemas de control de disparo, sistemas de guiado y electrónicos. La carrera espacial también dependía del control preciso de las naves. Por otra parte, la Teoría de Control también ha visto un uso creciente en campos como la economía y la sociología.
Teoría clásica: control en lazo cerrado
Para evitar los problemas del control en lazo abierto, la teoría de control introduce la realimentación. Un regulador de lazo cerrado utiliza la realimentación para controlar los estados y las salidas de un sistema dinámico. El nombre de "lazo cerrado" hace referencia al camino que sigue la información en el sistema: las entradas al proceso (p. ej, la tensión que se aplica a un motor eléctrico) afecta a las salidas del proceso (p. ej., la velocidad o el par que ofrece el motor). Estas salidas se miden con sensores (captadores en el lenguaje de control) y se procesan, una vez comparadas con la referencia o consigna, mediante un controlador o regulador; el resultado, una señal de control, se añade a la entrada al proceso, cerrando el lazo. El control de lazo cerrado siempre debe estar formado por: - Un proceso - Medida y transmisión de la variable - Controlador - Elemento final de control
El control con lazo cerrado presenta las siguientes ventajas sobre el control en lazo abierto:
- corrección de las perturbaciones (tales como rozamiento impredecible en un motor)
- buen comportamiento incluso con incertidumbre en el modelo, es decir, en aquellos casos en que la estructura del modelo no representa perfectamente la realidad del proceso o los parámetros del modelo no se pueden medir con absoluta precisión
- permite estabilizar procesos inestables
- tolerancia a variaciones en los parámetros
La única desventaja del control en lazo cerrado, frente al control en lazo abierto, es que el primero reduce la ganancia total del sistema. Esto lleva al uso conjunto del control en lazo abierto y cerrado, para mejorar el rendimiento.
Una arquitectura muy frecuente para un regulador en lazo cerrado es el regulador PID.
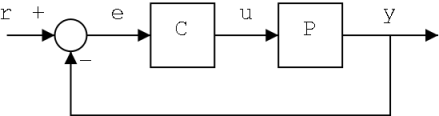
La salida del sistema y(t) se compara con el valor de referencia r(t), a través de las medidas de un sensor. Se alimenta el error e al regulador C. Se define el error e como la diferencia entre el valor de referencia y la salida del sistema. En función del error, el regulador modifica su salida, que es precisamente la alimentación u al proceso que se está controlando, P. Este esquema es el que se muestra en la figura.
El sistema en la figura es un sistema sencillo de una sola entrada y una sola salida, SISO (del inglés single-input-single-output); los sistemas más complejos, MIMO (Multi-Input-Multi-Output) son bastante frecuentes. En estos casos, las variables se representan mediante vectores en lugar de valores escalares.
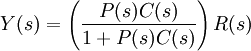
Si suponemos que el regulador C y el proceso P son lineales e invariantes en el tiempo (es decir, los elementos de su función de transferencia C(s) y P(s) no dependen del tiempo), el sistema de la figura se puede analizar aplicando la transformada de Laplace sobre las variables. Esto proporciona las siguientes relaciones:
Despejando Y(s) en función de R(s) se obtiene:
El término
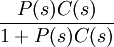 se denomina función de transferencia del sistema. El numerador es la ganancia en lazo abierto de r a y, y el denominador es uno más la ganancia del lazo cerrado. Si
se denomina función de transferencia del sistema. El numerador es la ganancia en lazo abierto de r a y, y el denominador es uno más la ganancia del lazo cerrado. Si  , entonces Y(s) es muy parecido a R(s), lo que significa que la salida se ajusta muy bien a la referencia r de control.
, entonces Y(s) es muy parecido a R(s), lo que significa que la salida se ajusta muy bien a la referencia r de control.Estabilidad
La estabilidad, en Regulación Automática, a menudo se define de la siguiente manera: un sistema es estable si, ante cualquier entrada acotada en un intervalo cualquiera de tiempo, la salida también está acotada. La estabilidad, así definida, se conoce como estabilidad BIBO (del inglés Bounded-Input-Bounded-Output) (se puede consultar también la estabilidad según Lyapunov).
Si un sistema es estable según la anterior definición, entonces el sistema no puede "explotar", es decir, ante una entrada finita la salida del sistema no puede tender a infinito en un intervalo todo lo amplio que se quiera. Matemáticamente, esto significa que para que un sistema lineal causal continuo en el tiempo sea estable, todos los polos de su función de transferencia deben
- estar situados en la mitad izquierda del plano complejo si se usa la transformada de Laplace, es decir, su parte real debe ser menor o igual que cero
O BIEN
- estar en la frontera o el interior del círculo de radio unidad si se usa la transformada Z, es decir, su módulo debe ser igual o menor que la unidad
En ambos casos, si el polo tiene parte real estrictamente menor que cero o el módulo es estrictamente menor que uno, es asintóticamente estable. Las variables de un sistema asintóticamente estable siempre disminuyen su valor inicial (salvo por el transitorio inicial) y no muestran oscilaciones permanentes, que sí aparecen cuando el polo tiene parte real exactamente igual a cero o bien el módulo igual a uno. En este último caso se dice que el sistema es simplemente estable. Un sistema estable (o simplemente estable) que nunca decrece ni crece con el tiempo, y no presenta oscilaciones, es marginalmente estable: en este caso tiene polos con componente real nula y componente compleja nula. Si existen polos con parte real nula pero parte imaginaria distinta de cero, aparecen oscilaciones.
Las diferencias entre ambos casos no suponen ninguna contradicción. La transformada de Laplace es en coordenadas cartesianas, mientras que la transformada Z es en coordenadas polares, y se puede demostrar que:
- la parte real negativa en el dominio de Laplace corresponde al interior del círculo unidad en el dominio Z
- la parte real positiva en el dominio de Laplace corresponde al exterior del círculo unidad en el dominio Z.
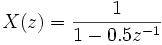
Si el sistema en cuestión tiene una respuesta impulsional de
considerando la transformada Z (véase este ejemplo) se obtiene
que presenta un polo en z = 0.5 (parte imaginaria cero). Este sistema es BIBO, es decir, asintóticamente estable, ya que el polo está fuera del círculo unidad.
Sin embargo, si la respuesta impulsional fuera
entonces la correspondiente transformada Z valdría
que tiene un polo en z = 1.5 y no es estable BIBO, puesto que dicho polo tiene módulo estrictemente mayor que uno.
Existen numerosas herramientas para el análisis de los polos de un sistema. Algunas de ellas son procedimientos gráficos, como el estudio del lugar de las raíces, los diagramas de Bode o los diagramas de Nyquist.
Controlabilidad y observabilidad
La controlabilidad y la observabilidad son los aspectos fundamentales de un sistema para poder decidir la mejor estrategia de control en el mismo. La controlabilidad es la posibilidad de llevar el sistema a un estado particular usando una señal de control adecuada. Si un estado no es controlable, entonces ninguna señal de control aplicada podrá nunca llevar al sistema hasta un estado controlable. Por otra parte, la observabilidad es la posibilidad de "adivinar", mediante la observación de las señales de entrada y salida del sistema, el estado interno del sistema. Es decir, si el sistema se encuentra en un estado no observable, el controlador no será capaz de corregir el comportamiento en lazo cerrado si dicho estado no es deseable.
Si se estudian los estados de cada variable del sistema que se va a controlar, cada estado "malo" (desde el punto de vista del control) de dichas variables debe ser controlable y observable para asegurar un funcionamiento correcto del sistema en bucle cerrado. Matemáticamente, si alguno de los autovalores del sistema no es, a la vez, observable y controlable, su efecto en la dinámica del sistema se mantendrá inalterado en el control en lazo cerrado que implementemos. Si dicho autovalor es inestable, su dinámica afectará al sistema en lazo cerrado y lo hará inestable. Los polos no observables no están presentes en la función de transferencia de una representación en el espacio de estados, por lo que a veces se prefieren en el análisis de sistemas dinámicos. Si un polo no observable es inestable, entonces inestabiliza el sistema y, tanto si dicho polo es controlable como si no lo es, el sistema no se podrá estabilizar (debido a que no se puede actuar sobre el polo por no ser observable).
En resumen, un sistema sólo será controlable cuando todos los polos inestables del mismo sean a la vez observables y controlables. La solución a problemas de control de sistemas no controlables o no observables suele incluir la adición de actuadores y sensores.
Estrategias de control más frecuentes
Cada sistema de control debe garantizar en primer lugar la estabilidad del comportamiento en lazo cerrado. En los sistemas lineales, esto se puede conseguir directamente mediante asignación de los polos. En los sistemas no lineales hay que recurrir a teorías específicas, habitualmente basadas en la Teoría de Aleksandr Lyapunov para asegurar la estabilidad sin tener en cuenta la dinámica interna del sistema. En función de la especificación de requisitos del sistema (es decir, de las condiciones que deseamos imponer a la salida) se debe escoger una estrategia de control u otra. A continuación se presenta una lista de las técnicas de control más habituales:
Reguladores PID
El regulador PID probablemente sea el diseño de control más empleado, por ser el más sencillo. "PID" son las siglas de Proporcional-Integral-Derivativo, y se refiere a los tres términos que operan sobre la señal de error para producir una señal de control. Si u(t) es la señal de control que se envía al sistema, y(t) es la medición que se hace de la señal de salida y r(t) es la salida deseada, el error se define como e(t) = r(t) − y(t) y un regulador PID toma el aspecto
El primer sumando aplica una señal proporcional al error. El segundo evalua cual ha sido la evolución del error, y cobra más importancia cuando el error cometido es pequeño pero constante., El tercero término evalua cual será la tendencia, y cobra más importancia cuando el error cometido se produce por instantes.
La dinámica deseada en lazo cerrado se obtiene ajustando los tres parámetros KP, KI y KD. Este ajuste a menudo se hace iterando de manera empírica y sin conocimiento previo del modelo del sistema. A menudo se puede asegurar la estabilidad usando únicamente el término proporcional. Los reguladores PID son la clase más usada de sistemas de control: sin embargo no se pueden usar en varios casos más complicados, especialmente si se consideran sistemas MIMO (Multiple Input Multiple Output, múltiples entradas y salidas).
Asignación del lugar de los polos
En los sistemas MIMO (múltiples entradas y salidas) se pueden asignar los lugares de los polos matemáticamente, usando una representación del espacio de estados del sistema en lazo abierto y calculando una matriz de realimentación que asigne a los polos sus posiciones deseadas. En sistemas complicados puede ser necesario un ordenador con capacidad de cálculo, y no siempre se puede asegurar la robustez de la solución. Más aún, en general no se miden todos los estados del sistema y por lo tanto se deben incorporar observadores al diseño del lugar de los polos.
Control óptimo
El control óptimo es una técnica particular de control en la que la señal de control intenta optimizar una determinada función de coste: por ejemplo, en el caso de un satélite, el valor de flujo de los cohetes que permitan llevarlo a la trayectoria deseada con el mínimo consumo de combustible. En las aplicaciones industriales se han usado dos métodos de diseño de control óptimo, ya que se ha demostrado que pueden garantizar estabilidad en lazo cerrado. Son el Control por Modelo Predictivo (MPC) y el Control Gaussiano Lineal Cuadrático (LQG). El primero permite tomar en consideración restricciones aplicables a las señales del sistema, que en muchos procesos industriales es un requisito decisivo. Junto con los reguladores PID, los sistemas MPC son la técnica más usada en el control de procesos.
Véase también
- Control de procesos
- Transformada de Laplace
- Ingeniería de control
Enlaces externos
- Todocontrol.es - La página web de los sistemas de regulación y control de instalaciones en edificios
Categorías: Ingeniería | Teoría de control



![x[n] = 0.5^n u[n] \,](/pictures/eswiki/48/053a2c5870d7e3b9453df47ae648de26.png)
![x[n] = 1.5^n u[n]\,](/pictures/eswiki/48/0291507326fc56d400c0f52efd6e4096.png)

Wikimedia foundation. 2010.