- Factorización QR
-
Factorización QR
En álgebra lineal, la descomposición o factorización QR de una matriz es una descomposición de la misma como producto de una matriz ortogonal por una triangular superior. La descomposición QR es la base del algoritmo QR utilizado para el cálculo de los vectores y valores propios de una matriz.
Contenido
Definición
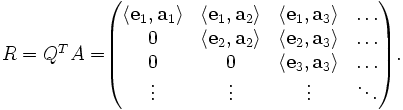
La descomposición QR de una matriz cuadrada real A es
donde Q es una matriz ortogonal (QTQ = I ) y R es una matriz triangular superior.
Cálculo de la descomposición QR
Mediante el método de ortogonalización de Gram-Schmidt
Recurriendo al método de ortogonalización de Gram-Schmidt, con las columnas de A como los vectores a procesar.
 . Entonces
. EntoncesNaturalmente, utilizamos los ais de A para obtener:
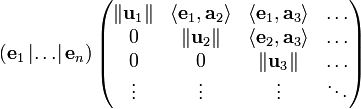
Ahora estas ecuaciones pueden ser escritas en forma matricial de esta manera:
 :::::::::
:::::::::
El producto de cada fila con cada columa de las matrices de arriba, nos da la respectiva columna de A con la que comenzamos y, por tanto, dada la matriz A, la hemos factorizado en una matriz ortogonal Q (la matriz de eks), aplicando el proceso de Gram-Schmidt, y la matriz resultante triangular superior es R.
Alternativamente, la matriz
 puede clacularse de la siguiente manera:
puede clacularse de la siguiente manera:Recordemos que:
 Entonces, tenemos
Entonces, tenemosNote que

 and QQT = I, so QT = Q − 1.
and QQT = I, so QT = Q − 1.Ejemplo
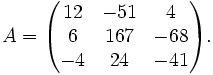
Si se considera la descomposición de
Se busca la matriz ortogonal Q tal que
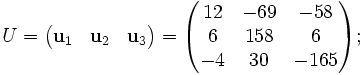
Por lo que calculamos Q mediante Gram-Schmidt como sigue:
Por lo tanto, tenemos
Considerando errores numéricos de operar con precisión finita en MATLAB, tenemos que
Mediante el uso de reflexiones de Householder
Una transformación de Householder o reflexión de Householfer es una transformación que refleja el espacio con respecto a un plano determinado. Esta propiedad se puede utilizar para realizar la transformación QR de una matriz si tenemos en cuenta que es posible elegir la matriz de Householder de manera que un vector elegido quede con una única componente no nula tras ser transformado (es decir, premultiplicando por la matriz de Householder). Gráficamente, esto significa que es posible reflejar el vector elegido respecto de un plano de forma que el reflejo quede sobre uno de los ejes de la base cartesiana.
La manera de elegir el plano de reflexión y formar la matiz de Householder asociada es el siguiente:
Sea
 un vector columna arbitrario m-dimensional tal que |||| = |α|, donde α es un escalar; (si el algoritmo se implementa utilizando aritmética de coma flotante, entonces α debe adoptar el signo contrario que x1 para evitar pérdida de precisión).
un vector columna arbitrario m-dimensional tal que |||| = |α|, donde α es un escalar; (si el algoritmo se implementa utilizando aritmética de coma flotante, entonces α debe adoptar el signo contrario que x1 para evitar pérdida de precisión).Entonces, siendo
 el vector (1,0,...,0)T, y ||·|| la norma euclídea, se define:
el vector (1,0,...,0)T, y ||·|| la norma euclídea, se define:v es un vector unitario perpendicular al plano de reflexión elegido. Q es una matriz de Householder asociada a dicho plano.
Esta propiedad se puede usar para transformar gradualmente los vectores columna de una matriz A de dimensiones m por n en una matriz triangular superior. En primer lugar se multiplica A con la matriz de Householder Q1 que obtenemos al elegir como vector
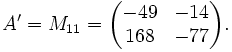
la primera columna de la matriz. Esto proporciona una matriz QA con ceros en la primera columna (excepto el elemento de la primera fila).el procedimiento se puede repetir para A′ (que se obtiene de A eliminando la primera fila y columna), obteniendo así una matriz de Householder Q′2. Hay que tener en cuenta que Q′2 es menor que Q1. Para conseguir que esta matriz opere con Q1A en lugar de A′ es necesario expandirla hacia arriba a la izquierda, completando con un uno en la diagonal, o en general:
Tras repetir el proceso t veces, donde t = min(m − 1,n),
es una matriz triangular superior. De forma que tomando
A = QR es una descomposición QR de la matriz A.
Este método tiene una estabilidad numérica mayor que la del método de Gram-Schmidt descrito arriba.
Una pequeña variación de este método se utiliza para obtener matrices semejentes con forma de Hessenberg, muy útiles en el cálculo de autovalores por acelerar la convergencia del algoritmo QR reduciendo así enormemente su coste computacional.
Ejemplo
Vamos a calcular la descomposición de la matriz
En primer lugar necesitamos encontrar una reflexión que transforme la primera columna de la matriz A, vector
 , en
, en 
usando la expresión,
y
en nuestro caso :
- α = 14 y

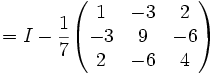
Por lo tanto
 y
y  , entonces
, entonces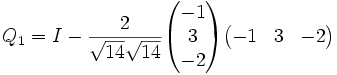
Ahora observamos:
con lo que ya casi tenemos una matriz triangular. Sólo necesitamos hacer cero en el elemento (3,2).
Tomando la submatriz bajo el (1, 1) y aplicando de nuevo el proceso a
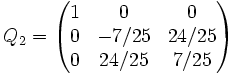
Mediante el mismo método que antes obtenemos la matriz de Householder
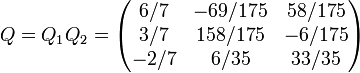
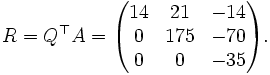
Finalmente obtenemos
La matriz Q es ortogonal y R es triangular superior, de forma que A = QR es la descomposición QR buscada.
Mediante rotaciones de Givens
Las descomposiciones QR también puden calcularse utilizando una serie de rotaciones de Givens. Cada rotación anula (hace cero) un elemento en la subdiagonal de la matriz, formando de este modo la matriz R. La concatenación de todas las rotaciones de Givens realizadas, forma la matriz ortogonal Q.
En la práctica, las rotaciones de Givens no se utilizan en la actualidad para construir una matriz completa y realizar un producto de matrices. En su lugar, se utiliza un procedimiento de rotación de Givens, que es equivalente a la multiplicación reducida de matrices de Givens, sin el trabajo extra de manejar los elementos reducidos. El procedimiento de rotación de Givens es útil en situaciones donde sólo pocos elementos fuera de la diagonal necesitan ser anulados y es más facil de paralelizar que las transformaciones de Householder.
Ejemplo
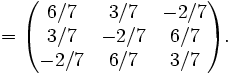
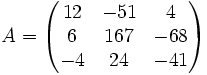
Calculemos la descomposición de
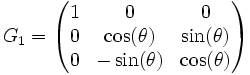
Primero, necesitamos formar una matriz de rotación tal que hagamos cero el elemento más inferior a la izquierda,
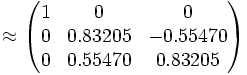
 . Construimos esta matriz empleando el método de la rotación de Givens y llamamos la matriz resultante G1. Rotamos primero el vector (6, − 4), representándolo a lo largo del eje X. Este vector forma un ángulo
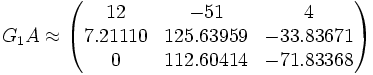
. Construimos esta matriz empleando el método de la rotación de Givens y llamamos la matriz resultante G1. Rotamos primero el vector (6, − 4), representándolo a lo largo del eje X. Este vector forma un ángulo  . Creamos la matriz ortogonal de rotación de Givens, G1:
. Creamos la matriz ortogonal de rotación de Givens, G1:Y el resultado de G1A tiene ahora un cero en el
 elemento.
elemento.
Procedemos análogamente con las matrices de Givens G2 y G3, que hacen cero los elementos subdiagonales a21 y a32, formando una matriz rectangular R. La matriz ortogonal QT es formada a partir del producto en cadena de todas las matrices de Givens QT = G3G2G1. Luego tenemos G3G2G1A = QTA = R, y la descomposición QR es A = QR.Relación con el determinante
Es posible utilizar la descomposición QR para encontrar el valor absoluto del determinante de una matriz. Suponiendo que una matriz se descompone según A = QR. Entonces se tiene
Puesto que Q es unitaria, | det(Q) | = 1. Por tanto,
donde rii son los valores de la diagonal de R.
Categorías: Matrices | Álgebra lineal numérica





















Wikimedia foundation. 2010.