- Análisis de la respuesta temporal de un sistema
-
Análisis de la respuesta temporal de un sistema
Contenido
Señales de prueba determinísticas
Respuesta del sistema a una entrada del tipo escalón
Una señal de entrada del tipo escalón permite conocer la respuesta del sistema frente a cambios abruptos en su entrada. Así mismo, nos da una idea del tiempo de establecimiento de la señal, es decir, cuanto se tarda el sistema en alcanzar su estado estacionario. Otra de las características de esta señal es que producto de la discontinuidad del salto, contiene un espectro de frecuencia en una amplia banda lo cual hace que sea equivalente a aplicar al sistema una gran cantidad de señales senoidales con un intervalo de frecuencias grande. Matemáticamente, esta señal se expresa como:
 . Donde u(t):escalón unitario; A: constante
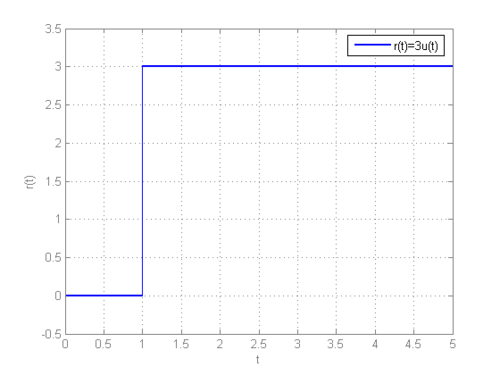
. Donde u(t):escalón unitario; A: constanteEn la figura que se muestra a continuación A = 3 y
Respuesta del sistema a una entrada del tipo rampa
Esta señal permite conocer cual es la respuesta del sistema a señales de entrada que cambian linealmente con el tiempo. Matemáticamente se representa como:
 . Donde t:tiempo; A: constante
. Donde t:tiempo; A: constante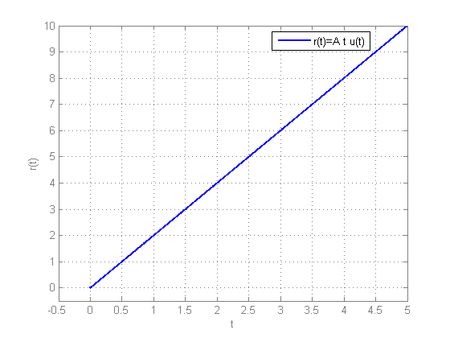
Respuesta del sistema a una entrada del tipo impulsional
La respuesta del sistema a una entrada del tipo impulso unitario permite tener una idea acerca del comportamiento intrínseco del sistema. La representación matemática de la función impulso unitario es:
Un sistema se representa matemáticamente a través de su función de transferencia. En el plano de laplace la expresión matemática que lo representa es:
 ; donde Y(s): salida del sistema y U(s): entrada del sistema La función de transferencia del impulso unitario es la unidad; es decir, U(s) = 1 Por tanto, la señal de salida tiene como transformada de Laplace a la función de transferencia del proceso G(s) = Y(s). De ello, se deduce que la respuesta impulsional y la función de transferencia contienen la misma información.
; donde Y(s): salida del sistema y U(s): entrada del sistema La función de transferencia del impulso unitario es la unidad; es decir, U(s) = 1 Por tanto, la señal de salida tiene como transformada de Laplace a la función de transferencia del proceso G(s) = Y(s). De ello, se deduce que la respuesta impulsional y la función de transferencia contienen la misma información.Respuesta temporal
Sistema de primer orden
Sistema de primer orden sin retardo
Un sistema de primer orden se puede modelar por la siguiente ecuación diferencial ordinaria.

Para calcular su función de transferencia aplicamos transformada de laplace y consideramos la condición inicial nula

Una vez aplicada la transformada a cada uno de los términos de la ecuación diferencial tenemos.
sY(s) − y(0) + a0Y(s) = b0U(s) Factorizando y escribiendo en forma de fución de transferencia.
Y(s)[s + a0] = b0U(s) 
La función de transferencia también puede ser escrita de la siguiente forma
 ,
,  La constante k es la ganancia de estado estacionario, la cual nos entrega el valor que toma la respuesta del sistema para un tiempo tendiendo a infinito. La constante τ es la constante de tiempo , la cual nos indicara el tiempo en el cual el sistema tiene un 63,21% del valor en estado estado estacionario. Se puede observar que este tipo de sistemas tiene un polo que es
La constante k es la ganancia de estado estacionario, la cual nos entrega el valor que toma la respuesta del sistema para un tiempo tendiendo a infinito. La constante τ es la constante de tiempo , la cual nos indicara el tiempo en el cual el sistema tiene un 63,21% del valor en estado estado estacionario. Se puede observar que este tipo de sistemas tiene un polo que es 
Sistema de primer orden con retardo
Sistema de segundo orden
Un sistema de segundo orden tiene como función de transferencia a la siguiente ecuación:
Donde: ωn: frecuencia natural de oscilación ,ξ:coeficiente de amortiguamiento y k: la ganancia de estado estacionario.
La ganancia de estado estacionario corresponde al valor constante que toma el sistema para un tiempo muy grande. Puede ser calculada a través del teorema final del límite de la función de transferencia F(s).

La respuesta del sistema depende de las raíces del denominador (polos del sistema). Para un sistema de segundo orden los polos se expresan como:
Dependiendo del valor ξ, los sistemas de segundo orden presentan distintos comportamientos.
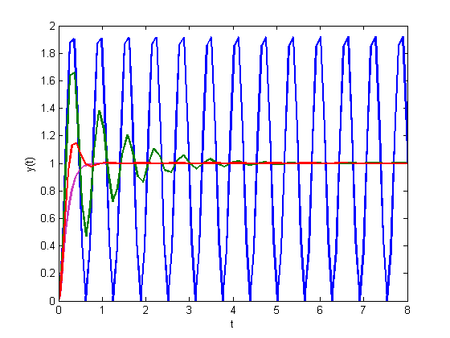
Tal como se observa en la figura cuando ξ = 0 (curva de color azul) las oscilaciones continuarán indefinidamente. Para valores mayores de ξ se obtiene un decaimiento más rápido de las oscilaciones, pero con un ascenso más lento de la respuesta (La curva en verde tiene un valor ξ = 0.1, mientras que para la roja ξ = 0.5. En el caso en el que ξ = 1, el sistema se torna criticamente amortiguado a tal punto que desaparecen las oscilaciones (Ver curva rosada).
Especificaciones en el dominio temporal de los sistemas de segundo orden
En la teoría de control, la caracterización de la respuesta temporal de un sistema se suele hacer mediante lo que se conoce como especificaciones del sistema. Las especificaciones más empleadas son:
- Tiempo de retraso (delay time). Es el tiempo necesario para que la respuesta alcance el 50% del valor final.
- Tiempo de subida (rise time). Es el tiempo requerido para que la respuesta pase del 10 al 90% del valor final. También puede definirse como el tiempo de paso del 5% al 95% o del 0% al 100%.
- Tiempo de pico: Es el tiempo que pasa hasta alcanzarse el primer pico de sobrepasamiento.
- Máximo sobrepasamiento: Es el valor de pico máximo por unidad. Se suele expresar en porcentaje.
- Tiempo de establecimiento: Es el tiempo necesario para que la respuesta del sistema esté dentro de un porcentaje (sobre el 5%, aunque es variable según el autor) del valor final.
Categoría: Teoría de control



Wikimedia foundation. 2010.