- Mars Exploration Rover
-
 Concepción artística de un Rover en Marte (crédito: Maas Digital LLC)
Concepción artística de un Rover en Marte (crédito: Maas Digital LLC)
La Mars Exploration Rover (MER) (Rover explorador de Marte) es una misión enviada para explorar Marte. Incluye el envío de dos Rovers (robots), Spirit y Opportunity para explorar la superficie y la geología de Marte. Fue dirigida por Peter Theisinger del Jet Propulsion Laboratory (JPL) de la NASA y el investigador Steven Squyres, profesor de Astronomía en la Universidad de Cornell.
Su principal meta científica, es la búsqueda y análisis de rocas y suelos que puedan contener pruebas de la presencia de agua en cualquier estado en la superficie Marciana. El Mars Exploration Rover es parte del programa de la NASA para la exploración de Marte, que ha logrado tres amartizajes exitosos: las dos sondas Viking en 1976 y la sonda Pathfinder en 1997.
El costo total de la construcción, lanzamiento, amortizaje y operación de los rovers en la superficie marciana durante los primeros (90) noventa días, que era el tiempo estimado de duración de la misión (entre enero y abril de 2004), contó con un presupuesto de 820 millones de dólares (aprox. 680 millones de euros). Dado que los rovers siguieron en funcionamiento después de más de tres años desde el amartizaje, la financiación se amplió hasta al menos septiembre de 2007.
Fue dado por muerto el 25 de mayo de 2011, debido a la falta de comunicación con el robot desde el 22 de marzo de 2010, coincidiendo con el invierno en marte. Se sospecha que el robot no pudo completar su recarga a base de paneles solares.[1]
En reconocimiento a la enorme cantidad de valiosa información científica obtenida por ambos rovers, se han nombrado dos asteroides en su honor: Spirit y Opportunity.
Línea de tiempo
El MER-A rover, Spirit, fue lanzado el 10 de junio de 2003 a las 17:59 UTC. Posteriormente el MER-B, Opportunity, fue lanzado el 7 de julio de 2003 a las 15:18 UTC. Spirit amartizó en el cráter Gusev de Marte el 4 de enero de 2004 a las 04:35 UTC, mientras Opportunity hacía lo propio en la Meridiani Planum marciana el 25 de enero de 2004, justamente en el lado opuesto de Marte que su compañero Spirit. En la semana que siguió al amartizaje del Spirit, la página web de la NASA registró 1.7 billones de visitas y una transferencia de datos de 34.6 terabytes, eclipsando los records conseguidos por anteriores misiones.
El 21 de enero, la Red de Espacio Profundo de la NASA pierde el contacto con el rover Spirit, por razones que en un principio se creyeron relacionadas con una tormenta sobre Australia. El rover transmitió un mensaje sin datos el miércoles 21, y Spirit perdió posteriormente una sesión de comunicación con la sonda Mars Global Surveyor, en órbita marciana, aquel mismo día. El jueves 22, se recibió en el Jet Propulsion Laboratory (JPL) una breve respuesta desde el rover que indicaba que éste se encontraba en problemas. El día 23 el equipo de la misión consiguió que el rover enviase más datos. Como consecuencia del fallo, que se creía que había sido provocado por un error en el subsistema de memoria flash, el rover no fue capaz de llevar a cabo ninguna investigación durante diez días, mientras los ingenieros actualizaban su software y hacían comprobaciones. El problema se resolvió reformateando la memoria flash del Spirit y actualizando su software con un parche que impidiera la sobrecarga de la memoria. Opportunity era también actualizado con el mismo parche como medida de precaución. Spirit consiguió reanudar totalmente sus investigaciones científicas el 5 de Febrero. Hasta la fecha, ésta ha sido la anomalía más grave de la misión.
El 23 de marzo se llevó a cabo una conferencia de prensa revelando lo que fue anunciado como grandes descubrimientos en la búsqueda de pistas de un pasado con agua líquida en la superficie marciana. Una representación del equipo científico mostró imágenes y datos que mostraban una superficie de estratificación y sedimentos variados dentro de las rocas de la superficie del interior de un cráter en Meridiani Planum, lugar de amartizaje del MER-B rover Opportunity, lo que sugería una historia de cursos de agua en la región. La distribución irregular de cloro y bromo en la zona sugería que el rover se asentaba en un lugar que habría sido en un tiempo anterior la línea de costa de un mar salado, ahora evaporado.
El 8 de abril la NASA anunció que extendía el periodo de vida operativa de los rovers de tres a ocho meses. Esto proporcionaba un presupuesto adicional de 15 millones de dólares estadounidenses a la misión hasta Septiembre, así como 2.8 millones de dólares al mes para continuar con las operaciones.
El 30 de abril, Opportunity llegó al cráter Endurance, empleando alrededor de cinco días en recorrer 200 m.
El 22 de septiembre la NASA volvió a anunciar que prolongaba la vida útil de los rovers otros seis meses más. Opportunity dejaba atrás el cráter Endurance, visitaba su escudo térmico abandonado y se dirigía al cráter Victoria. Spirit, por su parte, intentaba subir a las Columbia Hills.
El 6 de abril, con los rovers todavía perfectamente operativos, la NASA hizo el anuncio de una nueva prórroga de la misión hasta septiembre de 2006. Opportunity se dirigía ahora hacia Etched Terrain mientras Spirit se disponía a subir por una pendiente rocosa hacia lo alto de la Husband Hill.
 Panoramica del Spirit desde lo alto de la Husband Hill: una desértica llanura asolada por el viento, salpicada de rocas, y dunas de arena. La imagen está tomada en dirección Norte, apuntando hacia el fondo del "Tennessee Valley".
Panoramica del Spirit desde lo alto de la Husband Hill: una desértica llanura asolada por el viento, salpicada de rocas, y dunas de arena. La imagen está tomada en dirección Norte, apuntando hacia el fondo del "Tennessee Valley".El 21 de agosto de 2005, Spirit coronaba la Husband Hill, después de 581 'soles'. y haber recorrido 4,81 km.
Spirit celebraba su primer año en la superficie de Marte (669 'soles' o 687 días terrestres) el 20 de noviembre de 2005. Opportunity lo hacía el 12 de diciembre. Ambos rovers habían superado siete veces sus expectativas de vida. Al inicio de la misión no se contaba con que los rovers sobrevivieran más allá de noventa días. Para Chris Leger, conductor de las sondas, las Columbia Hills entonces, "eran sólo un sueño".
El 7 de febrero de 2006 Spirit alcanzaba la formación semicircular de rocas conocida como Home Plate. Es una interesante superficie de roca en capas que excita a los científicos. Se piensa que las rocas de Home Plate son depósitos volcánicos de origen explosivo, aunque existen otras posibilidades, incluidos depósitos de impacto o sedimentos creados por el aire o el agua.
El 13 de marzo de 2006, la rueda delantera derecha del Spirit dejó de funcionar al moverse hacia una pendiente para tratar de maximizar la exposición al sol durante el cercano invierno marciano. Continúa haciendo el intento, moviéndose hacia átras y arrastrando la llanta descompuesta.[1]
El Mars Exploration Rover
 Despegue de un cohete Delta II
Despegue de un cohete Delta IIEl Mars Exploration Rover (MER) está diseñado para poder ser albergado en el interior del morro de un cohete Delta II. El conjunto de la astronave está formado por varios módulos:
- Rover - 185 kg (408 lb.)
- Sonda de amartizaje - 348 kg (767 lb.)
- Escudo posterior / Paracaídas - 209 kg (742 lb.)
- Escudo térmico - 78 kg (172 lb.)
- Sonda de navegación - 193 kg (425 lb.)
- Combustible - 50 kg (110 lb.)
Todo ello completa una masa total de 1.063 kg (2.343 lb.).
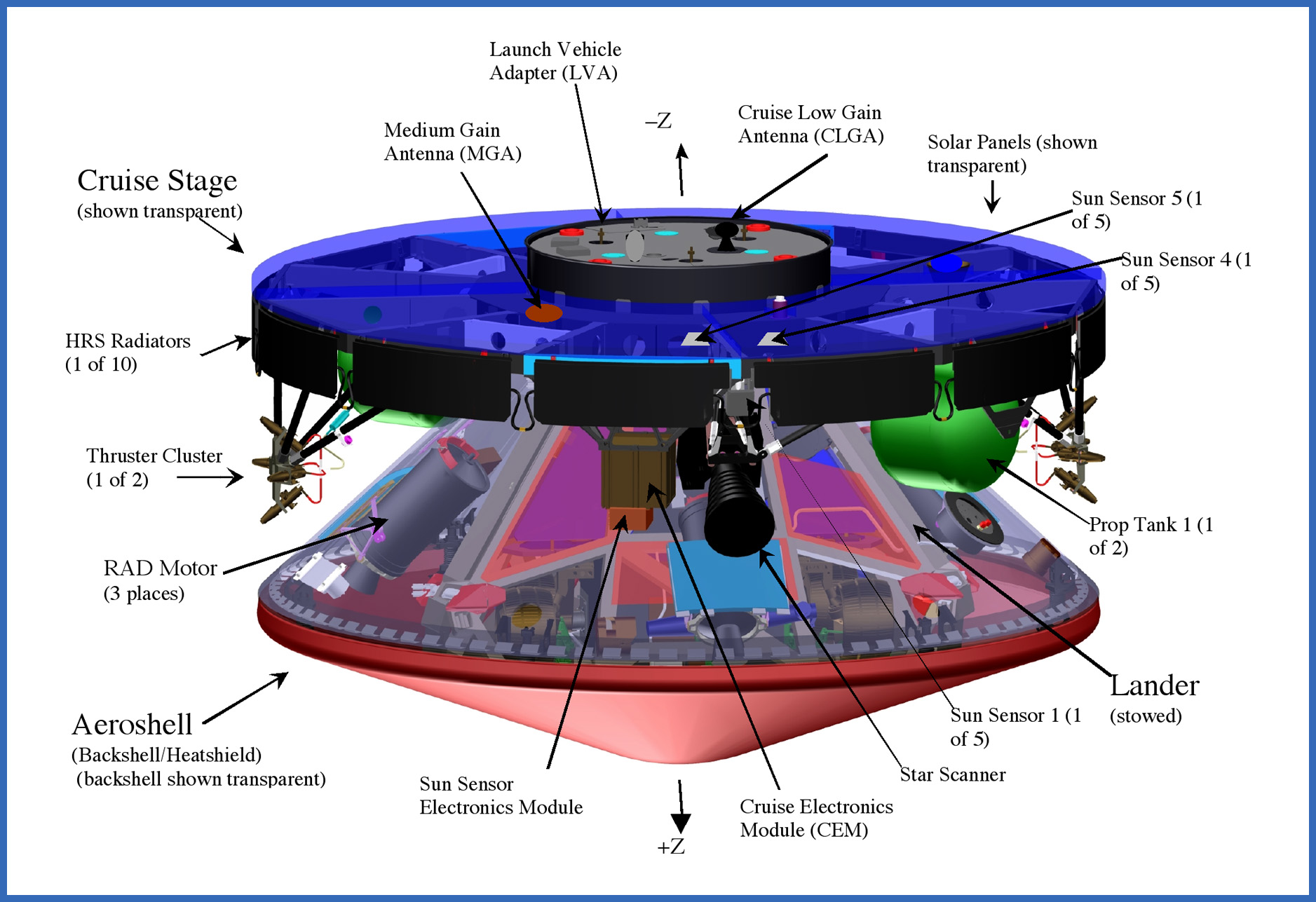
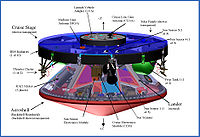 Diagrama de la sonda de navegación del MER (Cortesía NASA/JPL-Caltech).
Diagrama de la sonda de navegación del MER (Cortesía NASA/JPL-Caltech). Sonda de navegación del rover Opportunity.
Sonda de navegación del rover Opportunity.La sonda de navegación es el componente de la nave utilizado para realizar el viaje desde la Tierra a Marte. Esta pieza tiene un diseño muy similar a la utilizada en la misión Mars Pathfinder y mide aproximadamente 2,65 m. de diamétro por 1,6 m. de altura, incluyendo la sonda de amartizaje.
La estructura principal es de aluminio, con un anillo exterior cubierto por los paneles solares de unos 2,65 m de diámetro.
Estos paneles solares están divididos en cinco secciones y pueden proporcionar más de 600 W de energía en las proximidades de la Tierra y 300 W en Marte.
Un sistema de calefacción y varias capas de aislante mantienen los equipos electrónicos a una temperatura constante. Existe también un sistema de refrigeración por gas freón usado para eliminar el excesivo calor del ordenador principal y los sistemas de telecomunicaciones a bordo y evitar su recalentamiento. Los sistemas de navegación permiten al ordenador de vuelo interactuar con otros componentes de la nave, como el sensor de luz solar, el navegador estelar y los equipos de calefacción.
Navegador estelar y sensor solar: el navegador estelar (con un sistema de copia de seguridad incorporado) y el sensor solar, permiten a la nave determinar su posición en el espacio mediante el análisis de su posición con respecto al Sol y a otras estrellas fijas. En ocasiones la nave puede desviarse ligeramente de su rumbo, una situación que está prevista dada la enorme distancia (515 millones de kilómetros) que la nave ha de recorrer. Así, los sistemas de navegación calculan más de seis maniobras de corrección de trayectoria, además de varios tests para comprobar la integridad de los sistemas.
Tanques de combustible: para asegurar que la nave llega a Marte en el lugar previsto para su amartizaje existen dos tanques paralelos de aluminio con una capacidad máxima de unos 31 kg. llenos del propelente hidracina. Estos tanques de propelente permiten, junto con los sistemas de navegación y control, mantener a la nave en el rumbo correcto durante el viaje. Mediante pequeños y breves chorros el propelente permite tres tipos diferentes de maniobras de corrección de la trayectoria:
- Chorros en el sentido del eje principal de la nave usando pares de propulsores para modificar la velocidad.
- Dos propulsores en racimo (cuatro propulsores en cada racimo) que mueven la nave en sentido lateral mediante chorros de corta duración.
- Pares de propulsores simultáneos para maniobras de precisión (giros)
La sonda de navegación emplea para las comunicaciones ondas de radio de Banda X de alta frecuencia que consiguen el mismo rendimiento con un menor gasto de energía y antenas más pequeñas que otras astronaves anteriores que empleaban la Banda S. Los sistemas de navegación envían estas comunicaciones mediante dos antenas de Banda X montadas en la sonda de navegación.
Antena de baja ganancia
La antena de baja ganancia está montada dentro del anillo interior de la sonda de navegación. Durante el viaje la sonda es estabilizada imprimiéndole una ligera rotación sobre sí misma de 2 rpm. A pesar de esta rotación los sistemas se aseguran de que las antenas permanecen apuntando hacia la Tierra y de que los paneles solares se orientan hacia el Sol. La nave utiliza la antena de baja ganancia en las proximidades de la Tierra. Esta antena es omnidireccional, lo que implica que la energía de las transmisiones que alcanza la Tierra disminuye rápidamente con la distancia.
Antena de media ganancia
La antena de media ganancia está montada en el exterior del anillo de la sonda de navegación. A medida que la nave se mueve cada vez más lejos de la Tierra y más cerca de Marte, el Sol se desplaza hacia la mísma área del cielo que la Tierra y la energía recibida de las comunicaciones de la nave cada vez es menor. Entonces la nave pasa a utilizar la antena de media ganancia, más direccional, para poder dirigir la misma cantidad de energía en un rayo más estrecho que pueda alcanzar la Tierra.
Aerocubierta
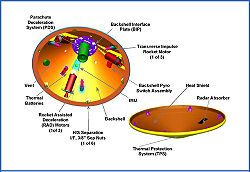 Diagrama de la Aerocubierta del Mars Exploration Rover.
Diagrama de la Aerocubierta del Mars Exploration Rover.La aerocubierta forma una cubierta protectora para la sonda de aterrizaje durante el viaje de siete meses a Marte. La aerocubierta, junto con la sonda y el rover, constituyen lo que los ingenieros llaman "el vehículo de ingreso." El principal objetivo de la aerocubierta es proteger la sonda junto con el rover guardado a salvo, del intenso calor producido por el ingreso a la atmósfera marciana el día del amartizaje.
La aerocubierta para los Rover de exploración de Marte tiene como base los diseños del Mars Pathfinder y Mars Viking.
Partes de la aerocubierta
La aerocubierta está constituida por dos partes principales:
- El escudo térmico (mitad plano, parduzco)
- La cubierta superior (mitad grande, pintada de blanco, forma cónica)
El escudo térmico protege a la sonda y al rover del intenso calor producido al ingresar a la atmósfera marciana y actúa como el primer aerofreno para la nave.
La cubierta superior lleva consigo un paracaídas y varios componentes utilizados durante las siguientes etapas de ingreso, descenso y amartizaje, incluyendo:
- Un paracaídas (guardado en la parte superior de la cubierta superior)
- La electrónica y baterías de la cubierta superior que disparan los dispositivos pirotécnicos tales como tuercas de separación, cohetes y el mortero del paracaídas.
- La Unidad de Medición Inercial Litton LN-200, la cual supervisa e informa la orientación de la cubierta superior mientras se columpia bajo el paracaídas
- Tres cohetes sólidos grandes llamados cohetes RAD-Rocket Assisted Descent (Descenso Ayudado por Cohete), proporcionando cada uno una tonelada de fuerza (10 kNewtons) por más de 2 s
- Tres cohetes sólidos pequeños llamados cohetes TIRS (montados de tal forma que la apunten horizontalmente hacia afuera de la cubierta superior) que proporcionan un leve empuje horizontal a la cubierta superior para ayudar a orientarla más verticalmente durante el encendido del cohete RAD principal
Composición
Construida por la Lockheed Martin Astronautics Co, en Denver, Colorado, la aerocubierta está fabricada de una estructura tipo panal de aluminio colocado entre capas de hojas de grafito-epoxy. La parte externa de la aerocubierta está provista de una capa tipo panal con resina fenólica. Este panal con resina fenólica está relleno con un material ablativo (también llamado “ablador”), que disipa el calor generado por la fricción con la atmósfera.
El ablador es una mezcla única de corcho, madera, aglutinante y un sinnúmero de diminutas esferas de cristal de silicio. Fue inventado para los escudos térmicos instalados en las misiones de los vehículos de aterrizaje Viking hace 25 años. Se utilizó una tecnología similar en la primera misión espacial tripulada de los EE.UU., Gemini y Apollo. Está formulado especialmente para reaccionar químicamente con la atmósfera marciana durante el ingreso y disipar el calor, dejando una estela de gas caliente detrás del vehículo. Este vehículo desacelerará de 19.000 km/h a 1.600 km/h en cerca de un minuto, produciendo aproximadamente 60 m/s² (6 g) de aceleración en el vehículo de aterrizaje y rover.
Tanto la cubierta superior como el escudo térmico están fabricados de los mismos materiales, sin embargo el escudo térmico tiene una capa de ablador con un espesor de 12,7 mm. De igual forma, en vez de estar pintado, la cubierta superior está provista de una capa de película PET de aluminio muy delgado para protegerla del intenso frío del espacio profundo. Esta capa se evaporará durante el ingreso a la atmósfera marciana.
Paracaídas
 Ensayo del paracaídas del Mars Exploration Rover.
Ensayo del paracaídas del Mars Exploration Rover.El paracaídas ayudará a desacelerar el vehículo de aterrizaje durante el ingreso, descenso y amartizaje. Está localizado en la cubierta superior.
Diseño del paracaídas
El diseño del paracaídas 2003 es parte del esfuerzo a largo plazo para el desarrollo de tecnología de paracaídas para Marte y tiene como base los diseños y experiencia de las misiones Viking y Pathfinder. El paracaídas para esta misión es 40% más grande que el del Pathfinder debido a que la carga más pesada para el Mars Exploration Rover es 80 a 85 kilonewtons (kN) cuando el paracaídas está totalmente inflado. En comparación, las cargas de inflado del Pathfinder fueron de aproximadamente 35 kN. El paracaídas fue diseñado y construido en South Windsor, Connecticut por la empresa Pioneer Aerospace (website), la compañía que también diseñó el paracaídas de la misión Stardust.
Composición del paracaídas
El paracaídas está hecho de dos telas duraderas y livianas: poliéster y nylon. El paracaídas tiene una brida triple (las cuerdas que conectan el paracaídas con la cubierta superior) hecha de Kevlar.
La cantidad de espacio disponible en la nave para el paracaídas es tan pequeña que éste debe ser empacado a presión. Antes del lanzamiento, una cuadrilla debe doblar apretadamente las 48 cuerdas de suspensión, tres bridas y el paracaídas. La cuadrilla del paracaídas lo carga en una estructura especial en la que después se aplica un gran peso al paquete del paracaídas varias veces. Antes de colocar el paracaídas en la cubierta superior, éste es calentado para esterilizarlo.
Partes que trabajan en conjunto con el paracaídas
 Dibujo conceptual del descenso con los cohetes RAD activos.
Dibujo conceptual del descenso con los cohetes RAD activos.Bridas de Zylon: después que el paracaídas es desplegado a una altitud de aproximadamente 10 km sobre la superficie, se separa el escudo térmico utilizando 6 tuercas de separación y resortes de empuje. El vehículo de aterrizaje se separa de la cubierta superior y desciende por una cuerda metálica a un sistema de frenado centrífugo construido en uno de los pétalos del vehículo de aterrizaje. El lento descenso por la cuerda metálica coloca el vehículo de aterrizaje en posición al final de otra brida (tether), la cual está compuesta de cerca de 20 m de Zylon trenzado.
El Zylon es una fibra avanzada parecida al Kevlar que es cosido en un patrón de telaraña (como el material de los cordones de los zapatos) para hacerlo más resistente. Las bridas de Zylon proporcionan espacio para el despliegue de las bolsas de aire, distancia desde las toberas de los motores de los cohetes sólidos y mayor estabilidad. Las bridas incorporan un arnés eléctrico que permite el arranque de los cohetes sólidos desde la cubierta superior así como proporcionar datos desde la unidad de medición inercial ubicado en la cubierta superior (la cual mide velocidad e inclinación de la nave) a la computadora de vuelo en el rover.
Descenso ayudado por cohetes (Rocket assisted descent) (RAD): debido a que la densidad atmosférica de Marte es menor a 1% de la de la Tierra, el paracaídas por sí sólo no puede desacelerar el vehículo de aterrizaje lo suficiente para garantizar una velocidad de amartizaje segura. El descenso de la nave es ayudado por cohetes que llevan a la nave a un alto total a una altura de 10-15 m sobre la superficie marciana.
Unidad de radar altímetrico: se utiliza una unidad de radar altímetrico para determinar la distancia a la superficie marciana. La antena del radar está ubicada en una de las esquinas inferiores del tetraedro del vehículo de aterrizaje. Cuando las mediciones del radar indican que el vehículo de aterrizaje está a la distancia correcta sobre la superficie, las bridas de Zylon son cortadas, soltando el vehículo de aterrizaje del paracaídas y la cubierta superior de tal forma que quede libre y despejado para el amartizaje. Los datos provenientes del radar también habilitan la secuencia para el inflado de las bolsas de aire y el disparo de los cohetes de la cubierta superior (RAD).
Bolsas de aire
 Dibujo conceptual de las bolsas de aire infladas.
Dibujo conceptual de las bolsas de aire infladas.Las bolsas de aire utilizadas en la misión Mars Exploration Rover son del mismo tipo utilizado por el Mars Pathfinder en 1997. Las bolsas de aire deben ser lo suficientemente fuertes para amortiguar la nave si amartiza sobre piedras o terreno escabroso y permitirle que rebote en la superficie de Marte a velocidades moderadas después de amartizar. Para hacer las cosas más complejas, las bolsas de aire deben ser infladas segundos antes de hacer contacto y desinfladas una vez que la nave se encuentre a salvo en el suelo.
La tela utilizada para las bolsas de aire nuevas utilizadas en Marte es de un material sintético llamado Vectran que también fue utilizado en el Mars Pathfinder. El Vectran es dos veces más resistente que otros materiales sintéticos tales como el Kevlar y se comporta mejor a bajas temperaturas.
Hay seis capas de 100 denier (10 mg/m) del resistente pero ligero Vectran protegiendo una o dos vejigas internas del mismo material de 200 denier (20 mg/m). Utilizando 100 denier (10 mg/m) significa que en realidad hay más tela en las capas externas donde se necesita, debido a que hay más hilos en el tejido.
Cada rover utiliza cuatro bolsas de aire con seis lóbulos cada una, las cuales están todas conectadas. La conexión es importante, ya que ayuda a aminorar algunas de las fuerzas de amartizaje conservando el sistema de bolsas flexible y sensible a la presión del terreno. La tela de las bolsas de aire no está unida directamente al rover; unas cuerdas que entrecruzan las bolsas mantienen unida la tela al rover. Las cueras dan a las bolsas su forma, lo cual permite que el inflado sea más fácil. Durante el vuelo, las bolsas se encuentran guardadas junto con tres generadores de gas que se utilizan para inflar las bolsas.
Vehículo de aterrizaje
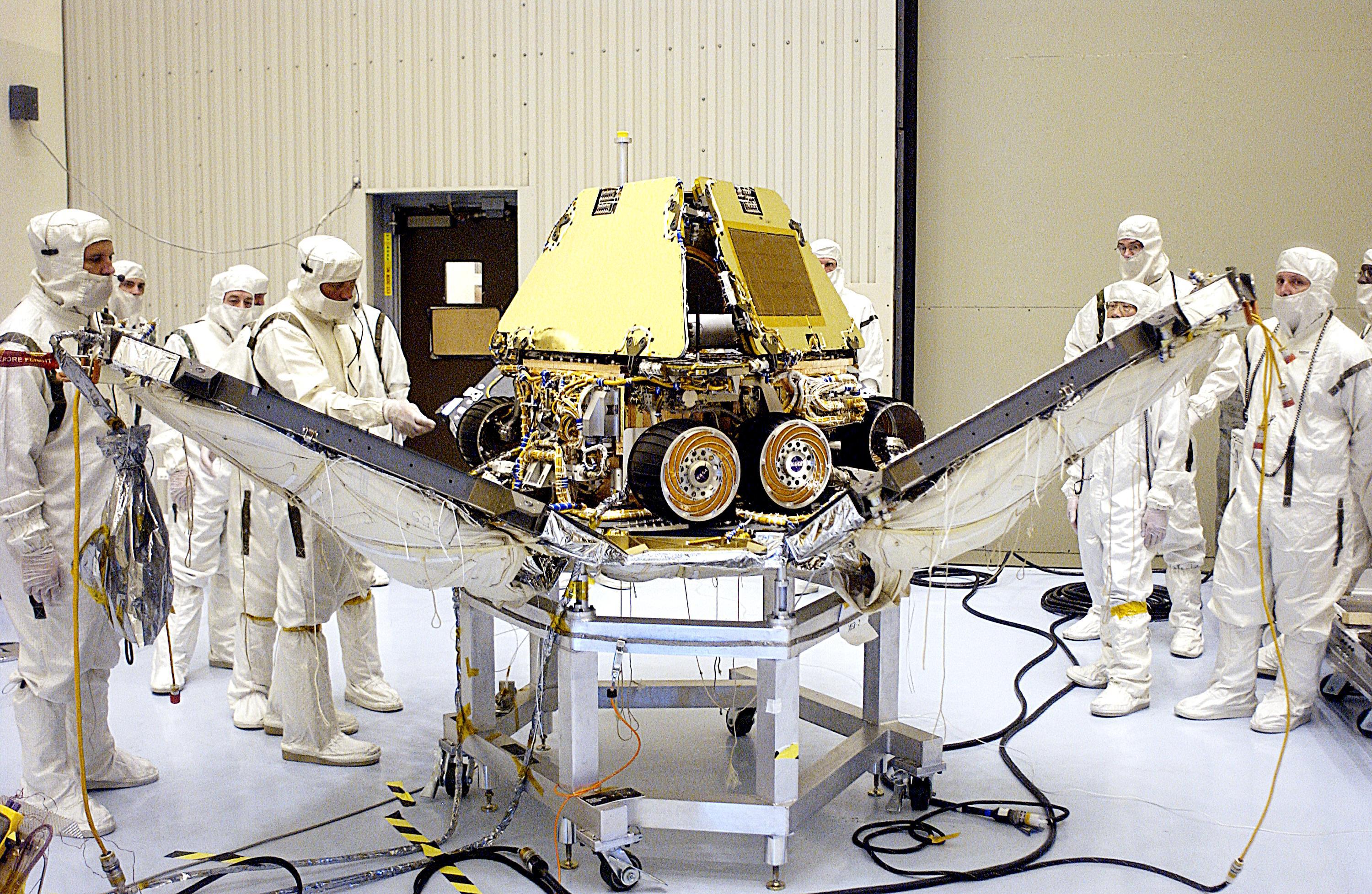
 Apertura de los pétalos del MER (Courtesy NASA/JPL-Caltech).
Apertura de los pétalos del MER (Courtesy NASA/JPL-Caltech).El vehículo de aterrizaje es una “concha” protectora que alberga el rover y lo protege, junto con las bolsas de aire, de las fuerzas de impacto.
El vehículo de aterrizaje es una estructura ligera y resistente, que consiste de una base y tres lados “pétalos” con la forma de un tetraedro. Su estructura consiste de barras y láminas que están hechas de materiales compuestos. Las barras están hechas de capas de fibra de grafito tejida en una tela, creando un material que es más ligero que el aluminio y más rígido que el acero. Se pegan (con pegamento) acopladores de titanio a las barras del vehículo de aterrizaje para permitir que se atornillen juntos. El rover es mantenido dentro del vehículo de aterrizaje con tornillos y tuercas especiales que se sueltan después del amartizaje con pequeños explosivos.
Enderezamiento del Rover
Los tres pétalos están conectados a la base del tetraedro por medio de bisagras. Cada bisagra tiene un potente motor que es capaz de levantar todo el vehículo de aterrizaje. La masa del rover más el vehículo de aterrizaje es de aproximadamente 533 kg Únicamente el rover pesa aproximadamente 185 kg. La gravedad de Marte es de aproximadamente 38% de la de la tierra, por lo que el motor no necesita ser tan potente como lo sería en la Tierra. Al tener un motor en cada pétalo garantiza que el vehículo de aterrizaje puede colocar el rover en una posición vertical no importando en que lado llegue a descansar el vehículo de aterrizaje después de rebotar y rodar en la superficie de Marte.
El Rover cuenta con acelerómetros que pueden detectar la dirección de la gravedad (hacia la superficie de Marte). La computadora del Rover, al saber cual es la dirección hacia abajo, ordena al pétalo correcto que se abra para colocar el Rover verticalmente. Una vez que el pétalo base se ha abierto y el Rover se encuentra en posición vertical, los otros dos pétalos se abren.
Los pétalos inicialmente se abren a una posición plana uniforme, de tal forma que todos los lados del vehículo de aterrizaje se encuentren rectos y nivelados. Los motores de los pétalos son suficientemente fuertes para que si dos de los pétalos llegan a descansar sobre rocas, la base junto con el Rover serán conservados en su lugar como un puente sobre la superficie de Marte. La base se mantendrá nivelada aun cuando los pétalos descansen en rocas, creando una superficie plana y recta a todo lo largo de los pétalos abiertos. El personal de vuelo en la Tierra puede entonces enviar órdenes al Rover para ajustar los pétalos creando un mejor camino de salida para el Rover del vehículo de aterrizaje y moverse con seguridad hacia la superficie de Marte sin caer desde una roca empinada.
Salida del Rover hacia la superficie Marciana
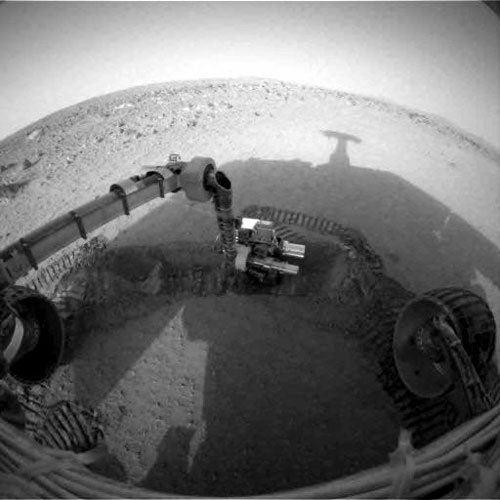
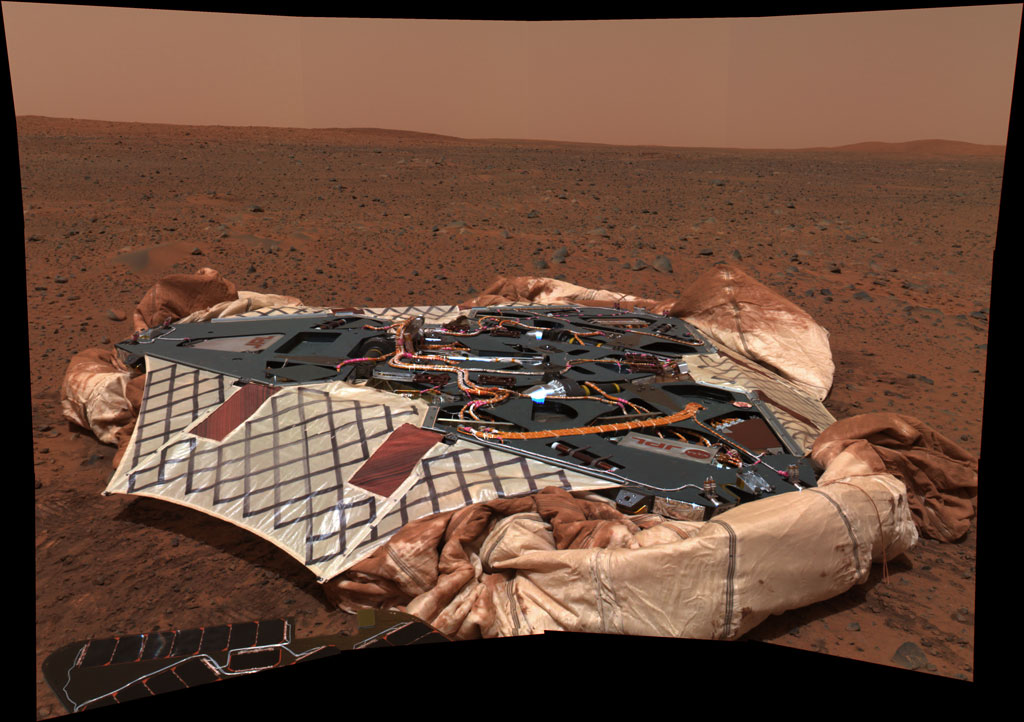
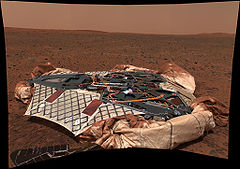 Vehículo de aterrizaje del Spirit en la superficie de Marte.
Vehículo de aterrizaje del Spirit en la superficie de Marte.El proceso de salida del rover del vehículo de aterrizaje se llama la fase de egreso. El rover debe ser capaz de salir del vehículo de aterrizaje sin que sus llantas se atasquen en el material de las bolsas de aire o caer desde una inclinación pronunciada.
Para ayudar en el proceso de salida, los pétalos del vehículo de aterrizaje están provistos de un sistema de retracción que arrastra lentamente las bolsas de aire hacia el vehículo de aterrizaje para alejarlas de la trayectoria del rover (este paso se realiza antes de la apertura de los pétalos del vehículo de aterrizaje.) Una pequeñas rampas están conectadas a los pétalos, los cuales se despliegan y crean superficies “para transitar” y abarcan espacios grandes entre los pétalos del vehículo de aterrizaje. Estas rampas pequeñas apodadas “Alas de Murciélago” están hechas de tela Vectran. Estas alas ayudan a cubrir terreno desigual y peligroso, obstáculos de roca, y material de las bolsas de aire que haya quedado y que pueda enredarse en las llantas del rover. Estas superficies de Vectran forman un área circular desde la cual el rover puede salir hacia la superficie, proporcionando trayectorias adicionales por las cuales el rover puede salir. Estas rampas también disminuyen la altura que tiene que salvar el rover al salir, previniendo una posible muerte para el rover. Si el rover golpea una roca o cae al suelo en el proceso de salida, se podría perder toda la misión.
Se asigan aproximadamente 3 horas para retraer las bolsas de aire y desplegar los pétalos del vehículo de aterrizaje.
Diseño del Rover
 Mars Exploration Rover vs. Sojourner (Cortesía NASA/JPL-Caltech).
Mars Exploration Rover vs. Sojourner (Cortesía NASA/JPL-Caltech).Sistema de tracción
Cada Rover tiene 6 ruedas montadas en una suspensión tipo mecedora que garantiza que las 6 ruedas estará en contacto con el suelo al moverse sobre terreno escabroso. El diseño mecedora garantiza que el cuerpo del Rover solamente se mueva la mitad del rango de movimiento que las “patas” y ruedas puedan experimentar sin este sistema de suspensión. Este mismo diseño permite que el Rover supere obstáculos (tales como rocas) o a través de depresiones mayores que el diámetro de la rueda (250 mm). Cada rueda tiene también “tacos” los cuales proporcionan agarre para escalar en arena suave o para pasar sobre rocas. Cada rueda tiene su propio motor. Las dos ruedas frontales y las dos traseras también tienen motores individuales de dirección (uno cada una.) La capacidad de dirección permite al Rover dar un giro total de 360 grados y virajes cerrados. El Rover está diseñado para soportar una inclinación de 45 grados en cualquier dirección sin voltearse. Sin embargo, el Rover está programado por medio de sus “límites de protección de fallas” de su programa de evasión de peligros para evitar exceder inclinaciones que excedan los 30 grados durante sus travesías.
Cada Rover tiene la habilidad de girar una de sus ruedas delanteras para pulverizar el terreno y está diseñado para permanecer quieto cuando está girando la rueda excavadora.
El Rover tiene una velocidad máxima en superficie plana de 50 mm/s. Sin embargo, para garantizar un movimiento seguro, el Rover está equipado con un programa de evasión de peligros que hace que el Rover se detenga y vuelva a evaluar su ubicación cada dos segundos. Por lo tanto, el Rover logra una velocidad promedio de 10 mm/s. El Rover está programado para moverse por casi 10 segundos, detenerse por 20 segundos para observar y entender el terreno al cual ha entrado, antes de moverse hacia adelante nuevamente por otros 10 segundos.
Sistemas de energía y electrónica
Cuando los paneles solares están totalmente iluminados, generan aproximadamente 140 W hasta para 4 h por día marciano (sol). El Rover necesita aproximadamente 100 wats para impulsarse. El sistema de energía del Rover incluye dos baterías recargables de ion litio con un peso de 7,15 kg cada una, que proporcionan energía al Rover cuando el sol no brilla, especialmente en la noche. A lo largo del tiempo, las baterías se degradarán y no podrán ser capaces de recargarse a su potencia total inicial. En comparación, la futura misión del Laboratorio Científico Marciano utilizará generadores termoeléctricos de radioisótopos (GTR) que durarán aproximadamente un año marciano para proporcionar energía a su gran cantidad de instrumentos. Se están considerando paneles solares para las misiones del LCM, pero los GTRs dan mayor versatilidad al trabajo en ambientes oscuros y altas latitudes en donde la energía solar no es un método eficiente para generar energía.
Se pensaba que para el sol 90 de la misión, la capacidad de los paneles solares para generar energía eléctrica se reduciría a aproximadamente 50 vatios. Esto se debe a la acumulación de polvo sobre los paneles así como el cambio de estación. Sin embargo, casi dos años terrestres después, la generación de energía eléctrica oscila entre 300 vatios por hora y 900 vatios por hora por sol, dependiendo de la acumulación de polvo. Han ocurrido eventos de limpieza (probablemente el viento) más frecuentemente de lo que la NASA había anticipado, conservando los paneles solares relativamente libres de polvo extendiendo la vida de la misión.
Los Rover ejecutan un sistema operativo incrustado en un CPU de 20 Mhz RAD6000 protegido contra la radiación con 128 MB de memoria DRAM con detección y corrección de errores y 3 MB de EEPROM. Los Rovers también cuentan con 256 MB de memoria flash. Para poder sobrevivir durante las diferentes fases de la misión, los “órganos vitales” del Rover no deben exceder temperaturas extremas de -40 °C a +40 °C. Por la noche los Rovers son calentados por 8 unidades calentadoras de radioisótopos (RHU) los cuales general 1 W cada uno de energía térmica proveniente de la desintegración de radioisótopos, junto con calentadores eléctricos que funcionan únicamente cuando es necesario. Se utiliza una capa de oro pulverizado y otra capa de aerogel como aislante.
Comunicaciones
El Rover cuenta con dos antenas, una de ganancia baja y otra de ganancia alta. La antena de ganancia baja es omnidireccional y transmite datos a una velocidad baja a la antenas en tierra de la Red del Espacio Profundo (Deep Space Network). La antena de alta ganancia es direccional y movible y puede transmitir datos a una velocidad mucho mayor.
Los Rovers también son capaces de subir información a otras naves en órbita alrededor de Marte, utilizando los orbitadores Mars Odyssey y Mars Global Surveyor como mensajeros que pueden retransmitir los datos de los Rovers a la Tierra. Los orbitadores también pueden enviar mensajes a los Rovers. Los beneficios que se obtienen al utilizarlos incluyen el que están más cerca de los Rovers que las antenas de la Red del Espacio Profundo (DSN) en la Tierra y que los orbitadores casi siempre tienen a la Tierra en su campo visual que los Rovers en el suelo marciano. Las señales de radio hacia y desde los Rovers se mandan por los orbitadores utilizando antenas UHF, las cuales tienen un menor alcance que las antenas de baja y alta ganancia. Una antena UHF se encuentra en el Rover y otra en un pétalo del vehículo de aterrizaje para ayudar a recabar información durante la fase crítica de amartizaje.
Las imágenes se almacenan y envían a la Tierra utilizando un programa de cómputo denominado ICER para todas las imágenes comprimidas con pérdida de datos. Todas las cámaras del MER producen imágenes de 1024 pixeles por 1024 pixeles a 12 bits por pixel.
Las imágenes para navegación, miniaturas y muchos otros tipos, se comprimen a aproximadamente 1 bit/pixel y se utilizan promedios de bit más pequeños (menores que 0,5 bit/pixel) en ciertas longitudes de onda de imágenes panorámicas multicolores.
La misión MER, con un total de 18 cámaras en dos Rovers, depende fuertemente en el formato para compresión de archivos de imágenes con base en ondículas ICER el cual permite el envío de imágenes a la tierra durante sus operaciones.
La misión MER está contribuyendo significativamente al avance de la tecnología para la compresión de imágenes para misiones del espacio profundo utilizando compresores de imágenes que proporcionan sustancialmente mayor compresión efectiva que el obtenido en misiones previas.
El compresor de imágenes ICER fue diseñado para cumplir las necesidades específicas de aplicaciones para el espacio profundo. ICER tiene como base las ondículas y produce compresión progresiva, proporcionando compresión sin pérdida y con pérdida de datos, e incorpora un esquema para la contención de errores con el objeto de limitar los efectos de la pérdida de datos en el canal del espacio profundo. ICER sobrepasa por mucho el compresor de imágenes JPEG utilizado en la misión Mars Pathfinder y proporciona una compresión sin pérdida de datos más efectiva que el compresor REICE utilizado en esa misión.
Instrumentos científicos
Ubicados en el Ensamblaje del Mástil Pancam se encuentran:
- Cámara panorámica (PanCam), para determinar la mineralogía, textura y estructura del terreno local.
- El espejo del Espectrómetro Miniatura por Emisión Termal (Mini-TES), de la Universidad Estatal de Arizona, para identificar rocas y suelos importantes que merezcan ser examinados y para determinar los proceso que formaron las rocas marcianas. Vea el artículo principal del Mini-TES.
Las cámaras montadas en el mástil se encuentran a 1,5 metros de altura. Un motor para todo el Ensamblaje del Mástil Pancam mueve las cámaras y el Mini-TES 360° en el plano horizontal. Un motor independiente para elevación puede apuntar las cámaras 90° sobre el horizonte y 90° por debajo del horizonte. Un tercer motor para permitir la elevación del espejo del Mini-TES, le permite apuntarlo 30° sobre el horizonte y 50° por debajo del horizonte.
El mástil también lleva dos cámaras monocromáticas para navegación y en el chasis del Rover se encuentran cuatro cámaras monocromáticas para detectar obstáculos (dos al frente y dos en la parte trasera.)
El brazo del Rover (también llamado el Dispositivo para el Despliegue de Instrumentos) contiene lo siguiente:
- Espectrómetro Mössbauer (MB) MIMOS II, desarrollado por el Dr. Göstar Klingelhöfer de la Universidad Johannes Gutenberg en Mainz, Alemania, el cual se utiliza para investigaciones de primer plano de la mineralogía de rocas y suelos que contienen hierro.
- Espectrómetro de Rayos X a base de partículas Alfa (APXS), desarrollado por el Instituto de Química Max Planck en Mainz, Alemania, el cual es utilizado para análisis de primer plano de la abundancia de elementos que componen las rocas y suelos.
- Imanes, para atraer partículas de polvo magnéticas, desarrollado por Jens Martin Knudse y su grupo en el Instituto Niels Bohr, Copenhague. El espectrómetro Mössbauer y el espectrómetro de Rayos X a base de partículas Alfa analizarán las partículas atraídas y ayudarán a determinar el porcentaje de partículas magnéticas y partículas no-magnéticas y la composición de minerales magnéticos en el polvo suspendido en el aire y en las rocas que hayan sido pulverizadas por la Herramienta para Abrasión de Rocas. También cuenta con imanes en la cubierta frontal del Rover, los cuales son estudiados extensamente por el espectrómetro Mössbauer.
- Cámara para imágenes microscópicas (MI), para obtener imágenes de primer plano de alta resolución de rocas y suelos.
- Herramienta para Abrasión de Rocas (RAT), para remover la superficie gastada de las rocas y exponer material fresco para que sea examinado por los instrumentos de abordo.
El brazo robótico podrá ser capaz de colocar los instrumentos directamente contra la roca o suelos que sean considerados interesantes.
Nombramiento del Spirit y Opportunity
Los rovers Spirit y Opportunity fueron nombrados a través de un concurso de redacción. El participante ganador fue Sofi Collis, una estudiante Ruso-Americana de tercer año de Arizona.
Solía vivir en la orfandad.
Era oscuro, frío y solitario.
En la noche, miraba el cielo estrellado y me sentía mejor.
Soñaba que podía volar allá.
En América, puedo hacer que mis sueños se vuelvan realidad...
Gracias por el “Espíritu” y la “Oportunidad”
—Sofi Collis, 9 años de edadAntes de la competencia, durante el desarrollo y construcción de los rovers, eran conocidos como MER-1 (Opportunity) y MER-2 (Spirit). Internamente NASA también utiliza las designaciones MER-A (Spirit) y MER-B (Opportunity).
Maestro
El equipo de la NASA utiliza un software llamado SAP para ver las imágenes transmitidas por el rover y para planificar las actividades diarias. Existe una versión disponible para el público llamado Maestro. Este programa está desarrollado en Java por lo que puede correr en diferentes plataformas incluyendo Microsoft Windows, Macintosh, Solaris, Linux, e Irix. El programa, junto con los juegos de datos, se pueden obtener desde las Oficinas Principales de Maestro .
Marcas de tiempo de la imágenes de los Rovers
Es posible distinguir el tiempo en que fue tomada una imagen por los rovers a partir del nombre del archivo de la imagen.
Las imágenes tomadas por el Spirit y Opportunity tienen nombres de archivos con una marca de tiempo incorporada: los caracteres 3-11 representan el número de segundos terrestres desde la época J2000.00 (Enero 1, 2000 11:58:55.816 UTC) [4]. Por lo tanto una imagen con un nombre similar a "1P132176262ESF05A6P2670R8M1.JPG" tiene una marca de tiempo de 132176262 segundos, que corresponde a Marzo 10, 2004 07:36:37.816 UTC.
Nota: se agregó un segundo bisiesto después del 31 de diciembre de 2005.
Véase también
Referencias
- Algunas partes de este artículo se tomaron del siguiente artículo NASA/JPL MER.
- Información adicional tomada de la página del MER
Enlaces externos
 Wikimedia Commons alberga contenido multimedia sobre Mars Exploration RoverCommons.
Wikimedia Commons alberga contenido multimedia sobre Mars Exploration RoverCommons.
Páginas de la NASA
- Página del MER
- Página de imágenes del MER
- Página principal de la Nasa que abarca todas las misiones actuales de Marte
- NASA Revista fotográfica de la misión - Archivo de imágenes del MER, así como de otras imágenes de Marte
- Reloj de la hora de Marte
Error en la cita: Existen referencias en esta página, pero no pueden ser mostradas porque no se ha detectado la plantilla {{listaref}}. Por favor, añádela o cierra correctamente la última referencia, según el caso.Categorías:- Programa espacial de Estados Unidos
- Sondas espaciales de Marte








Wikimedia foundation. 2010.